Dataset & pipeline
Indoor iPhone scenes
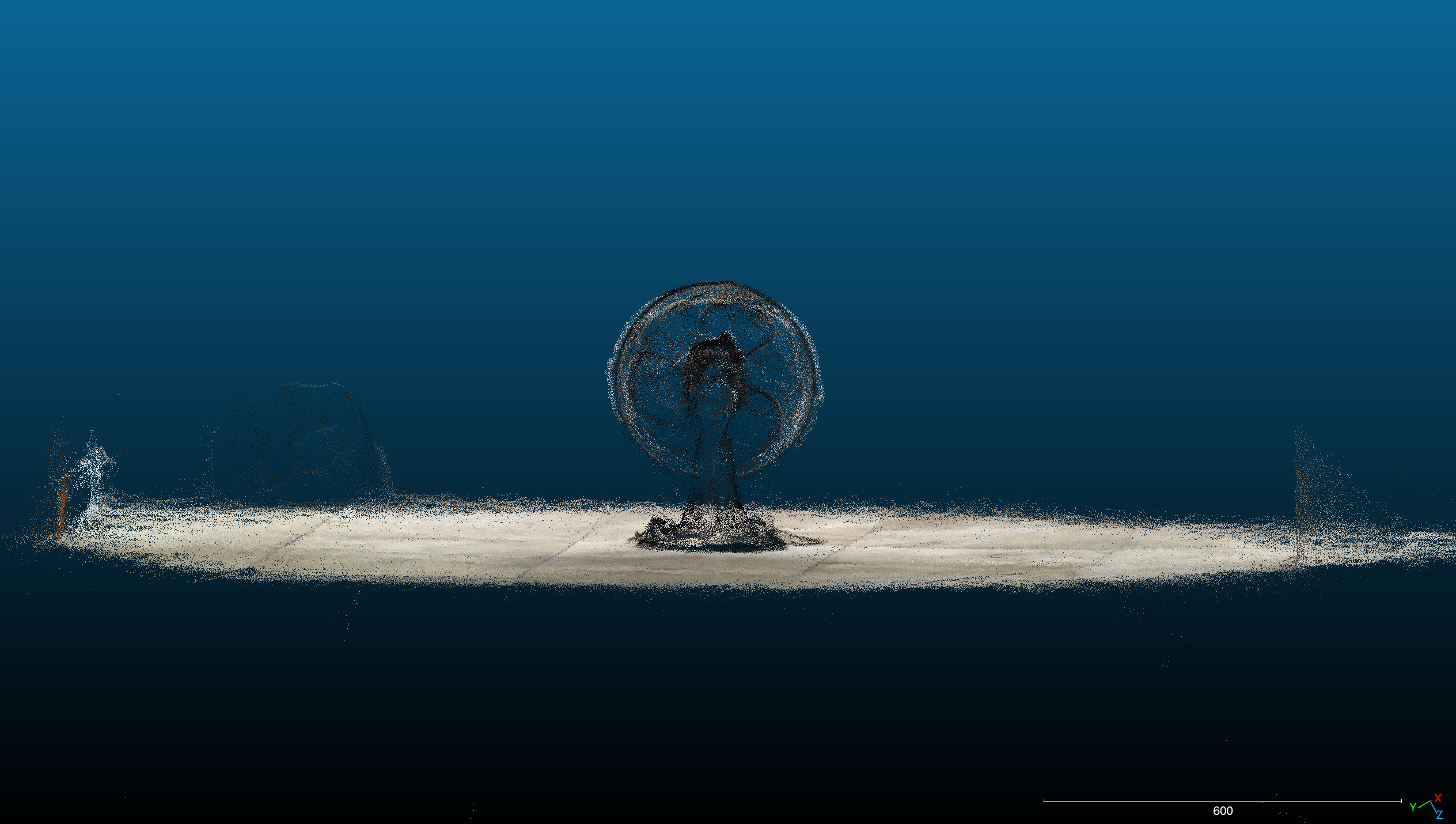
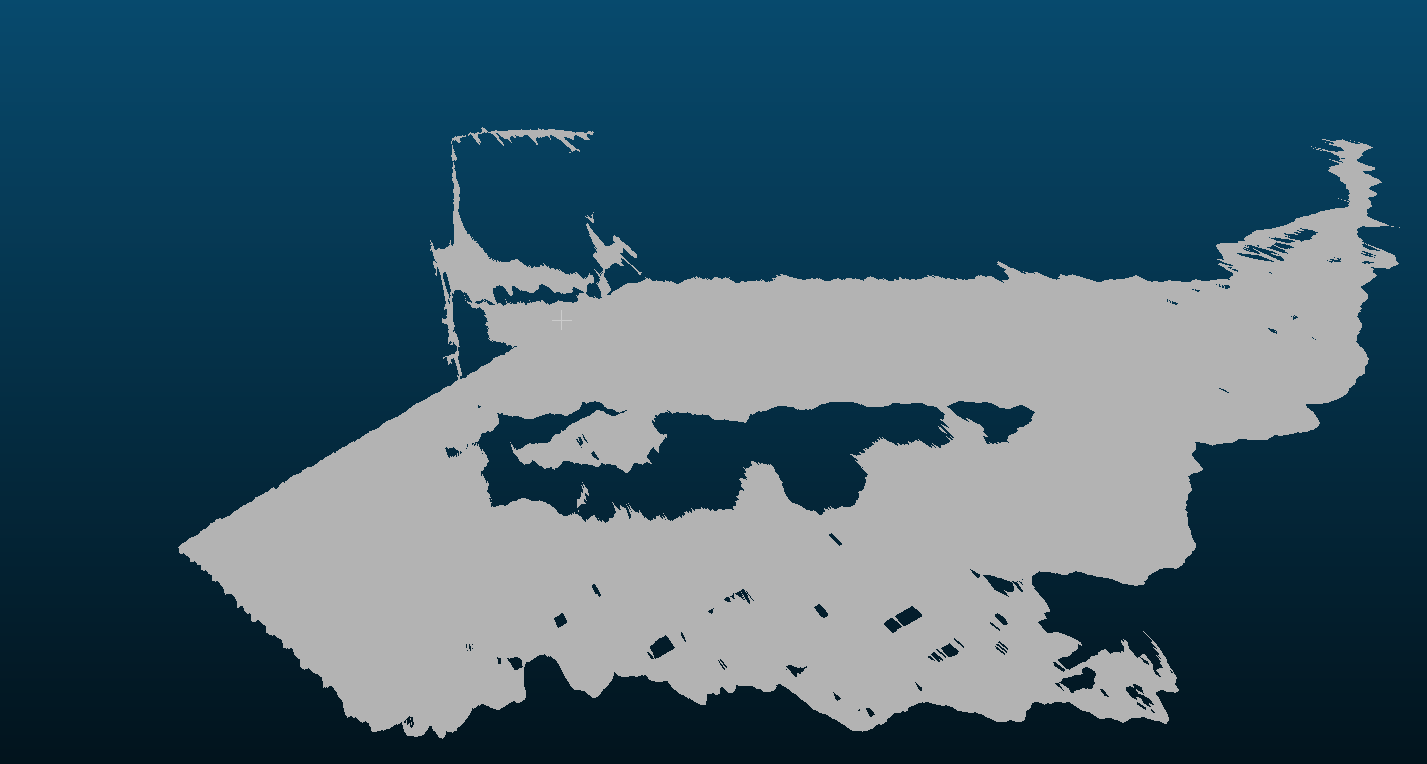
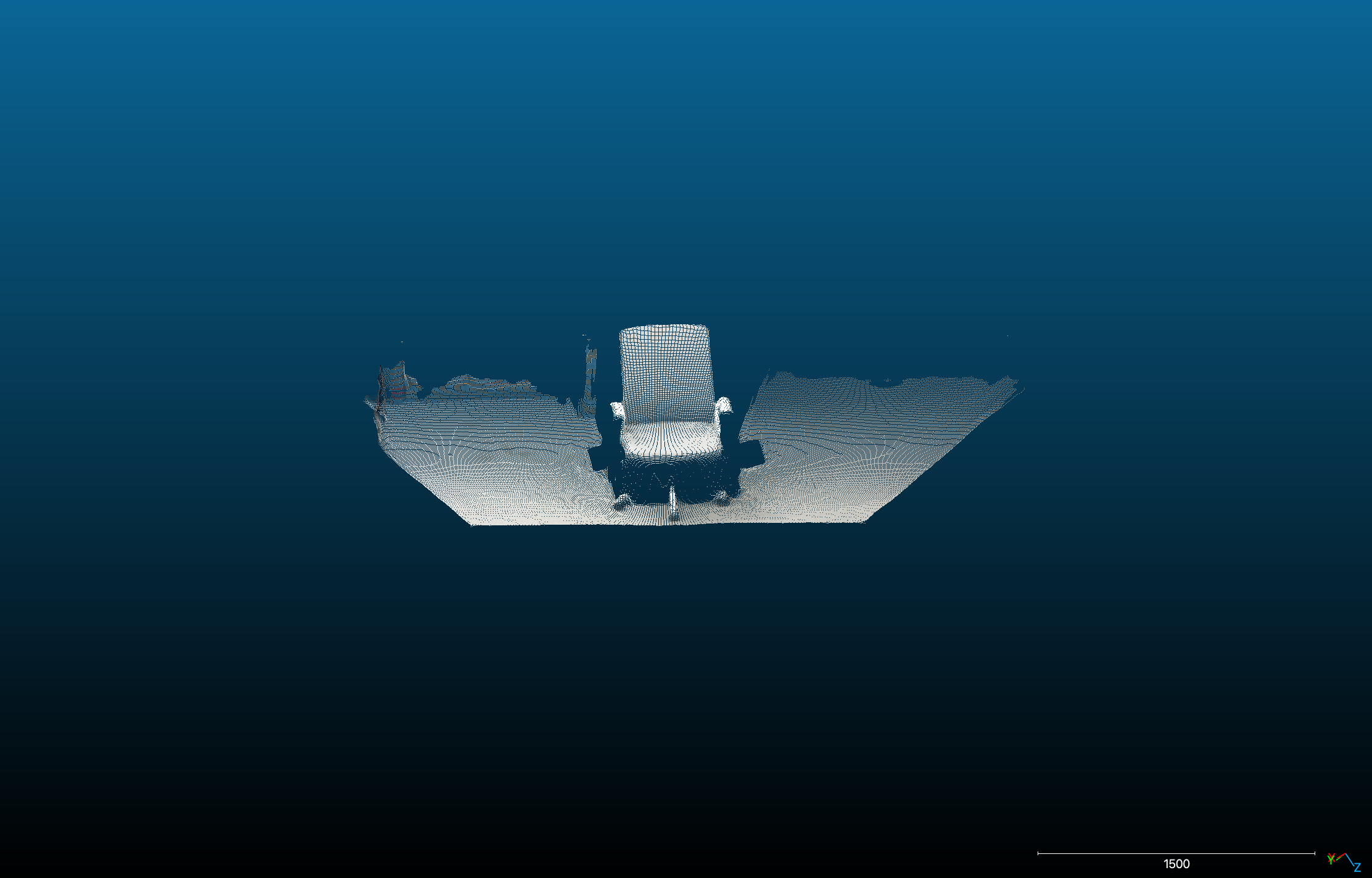
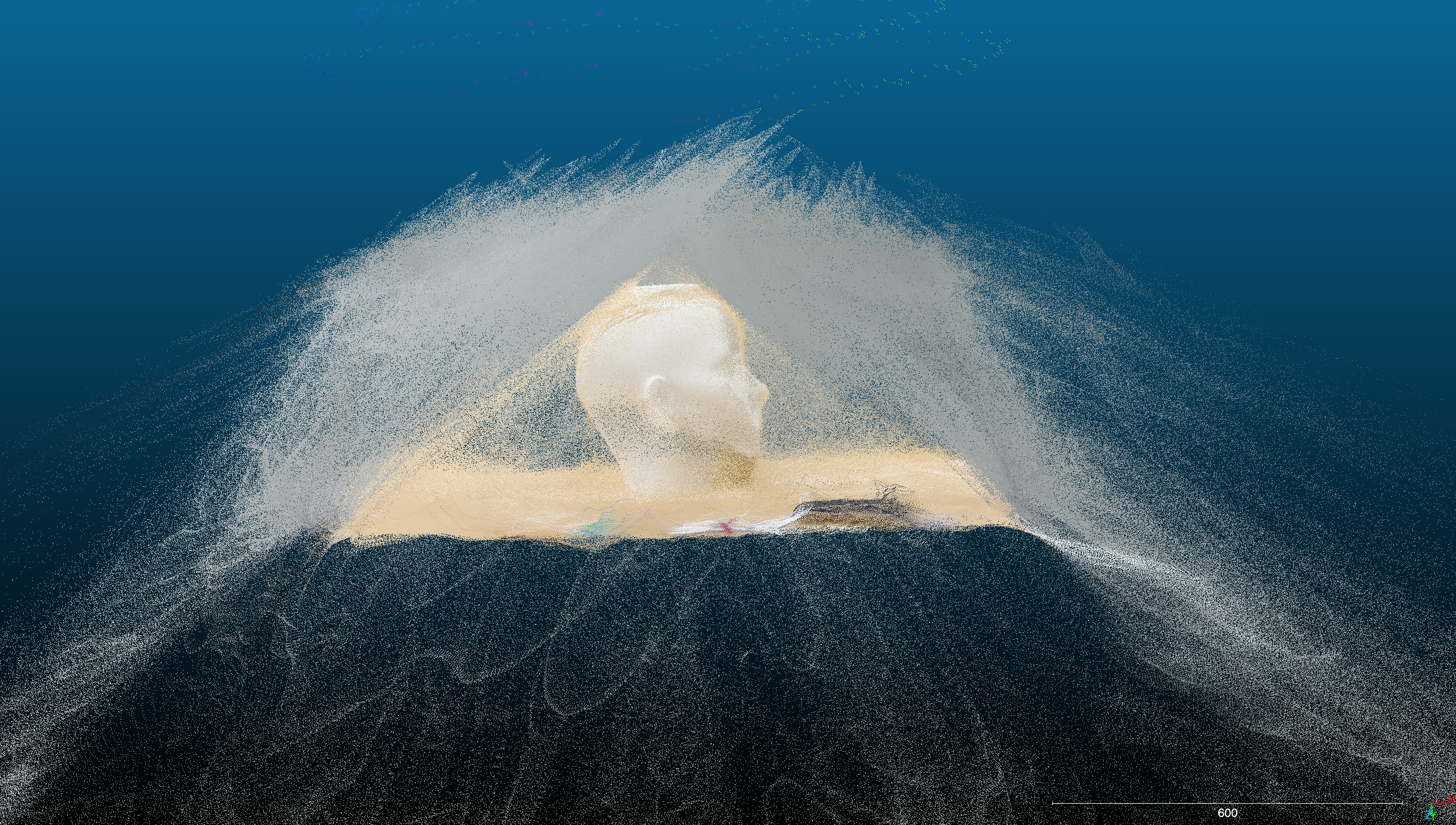
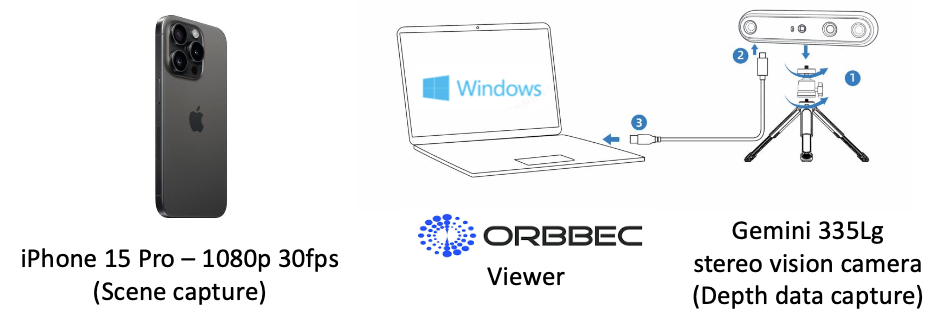
Four objects filmed with an iPhone 15 Pro under day and night lighting (~90 frames/scene at 3 fps). Ground truth from a ORBBEC Gemini 335Lg stereo camera (ROS1 .BAG).
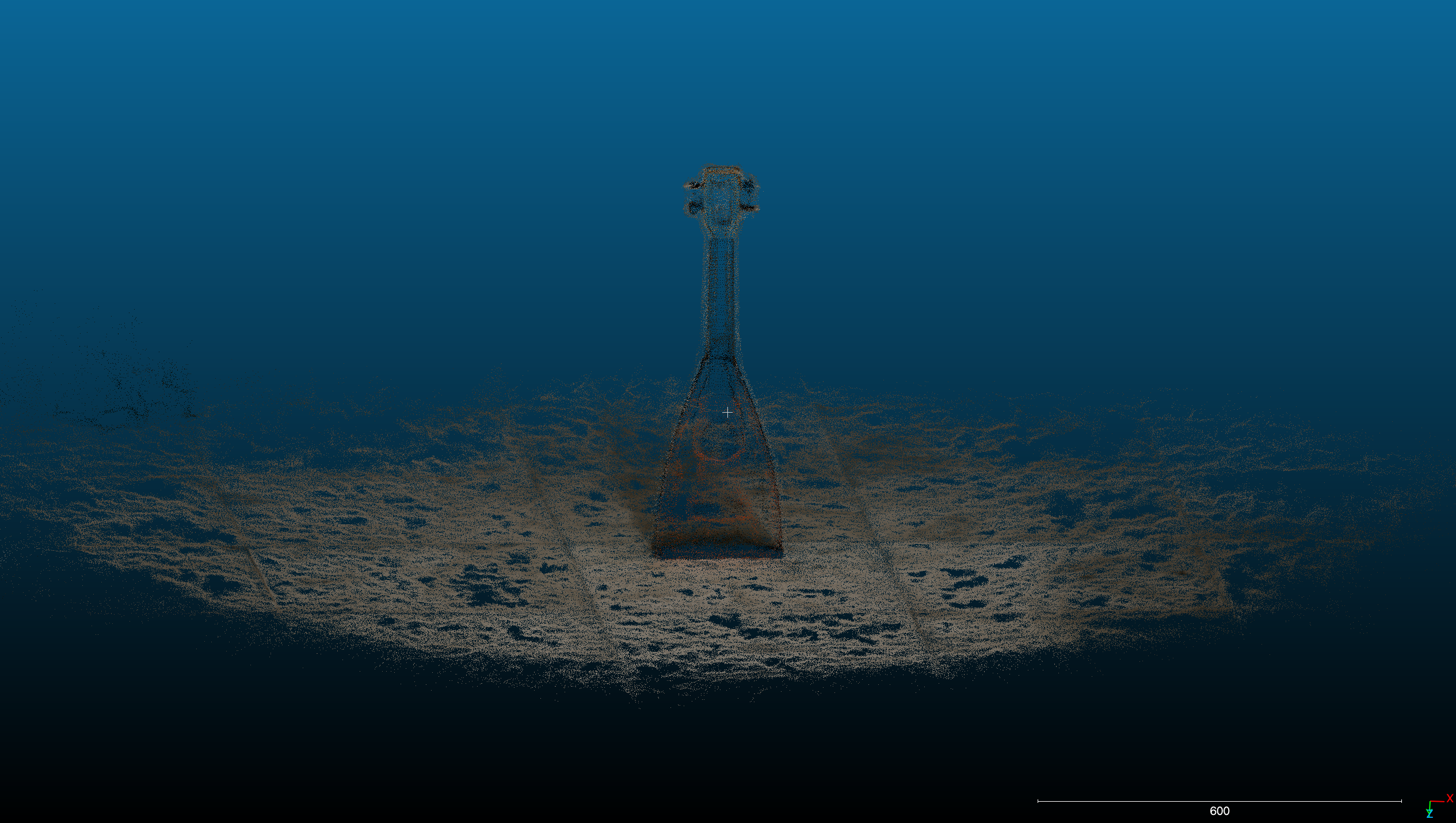
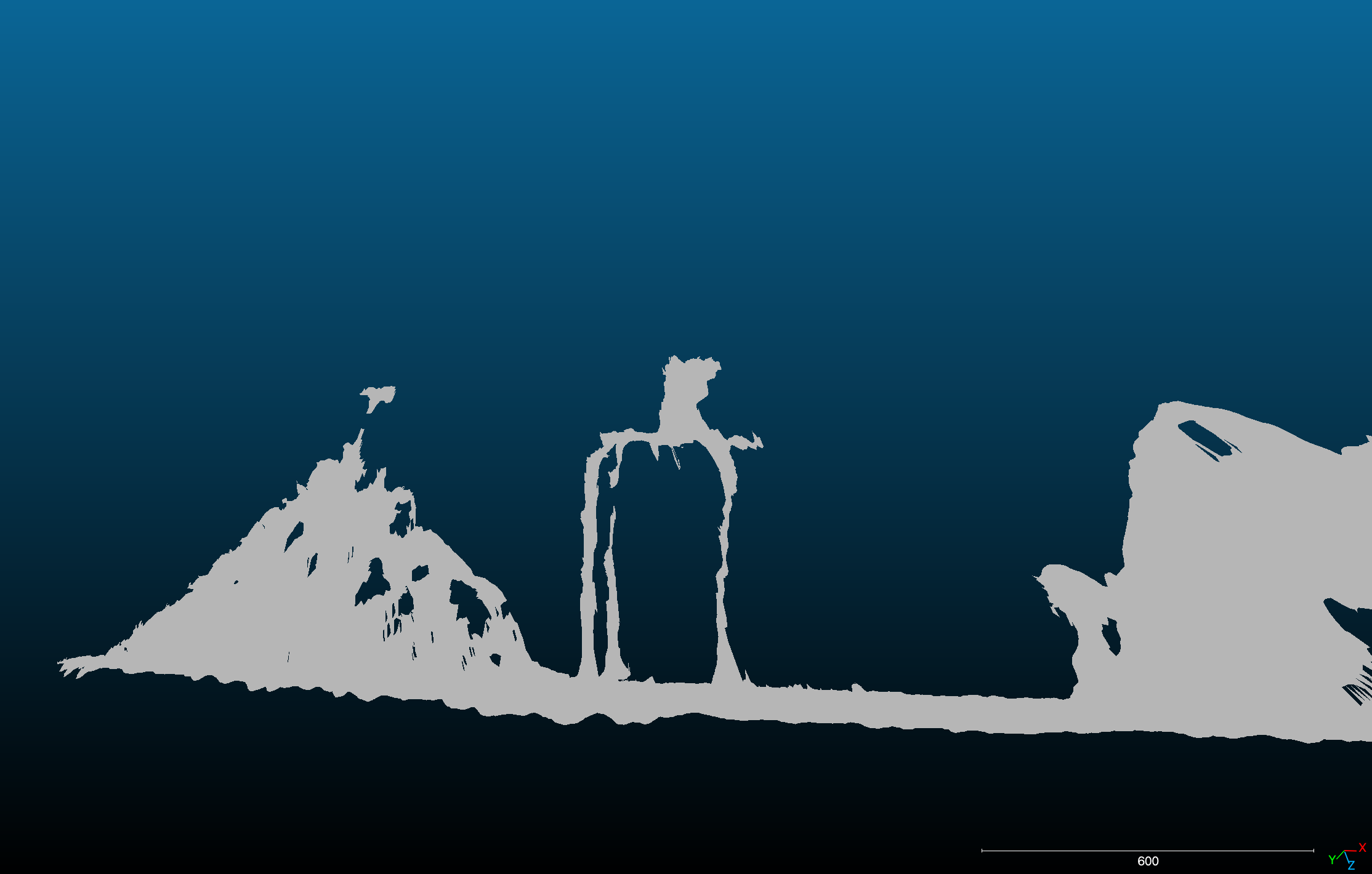
Ukulele Day
Ukulele Night
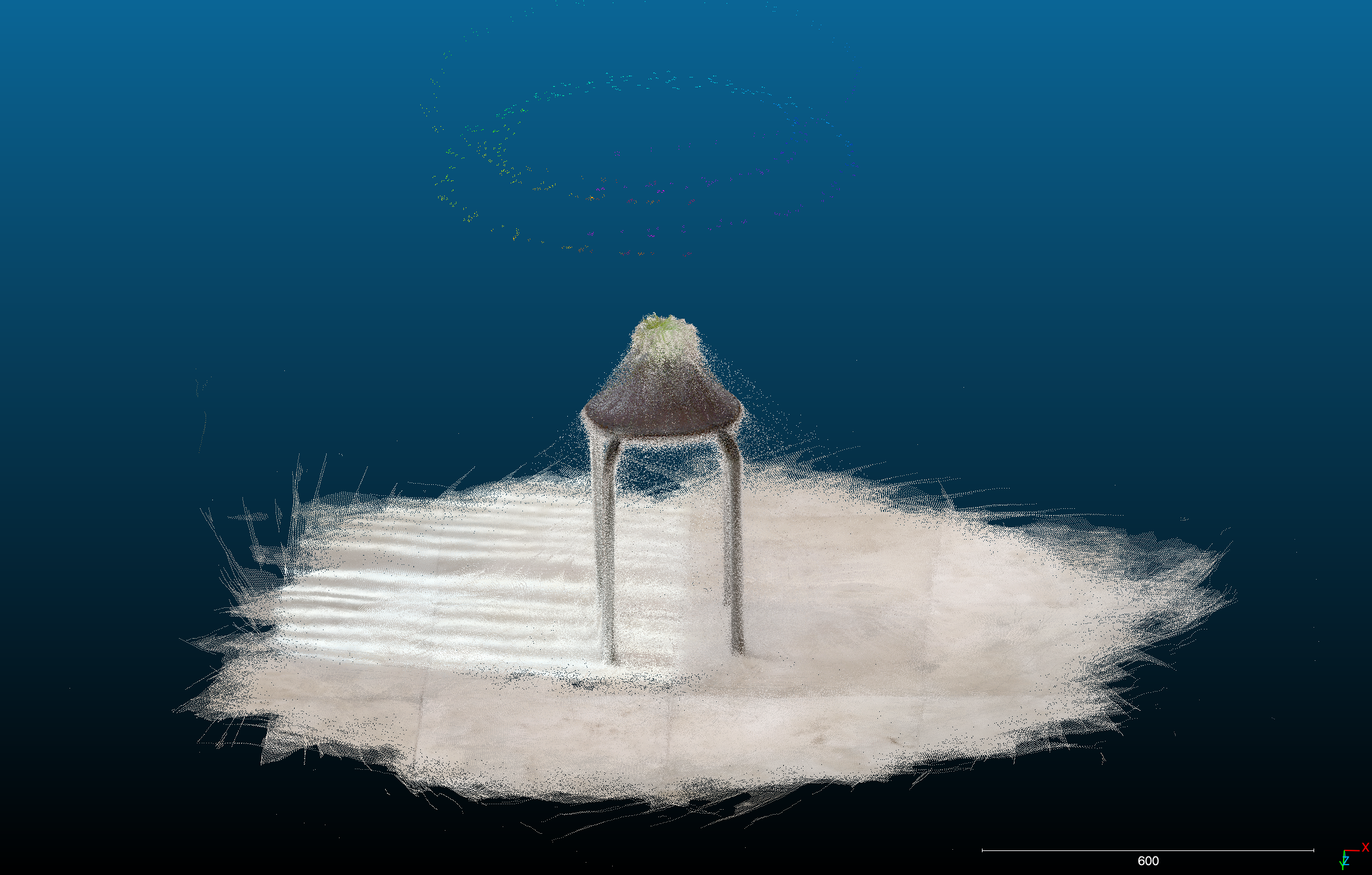
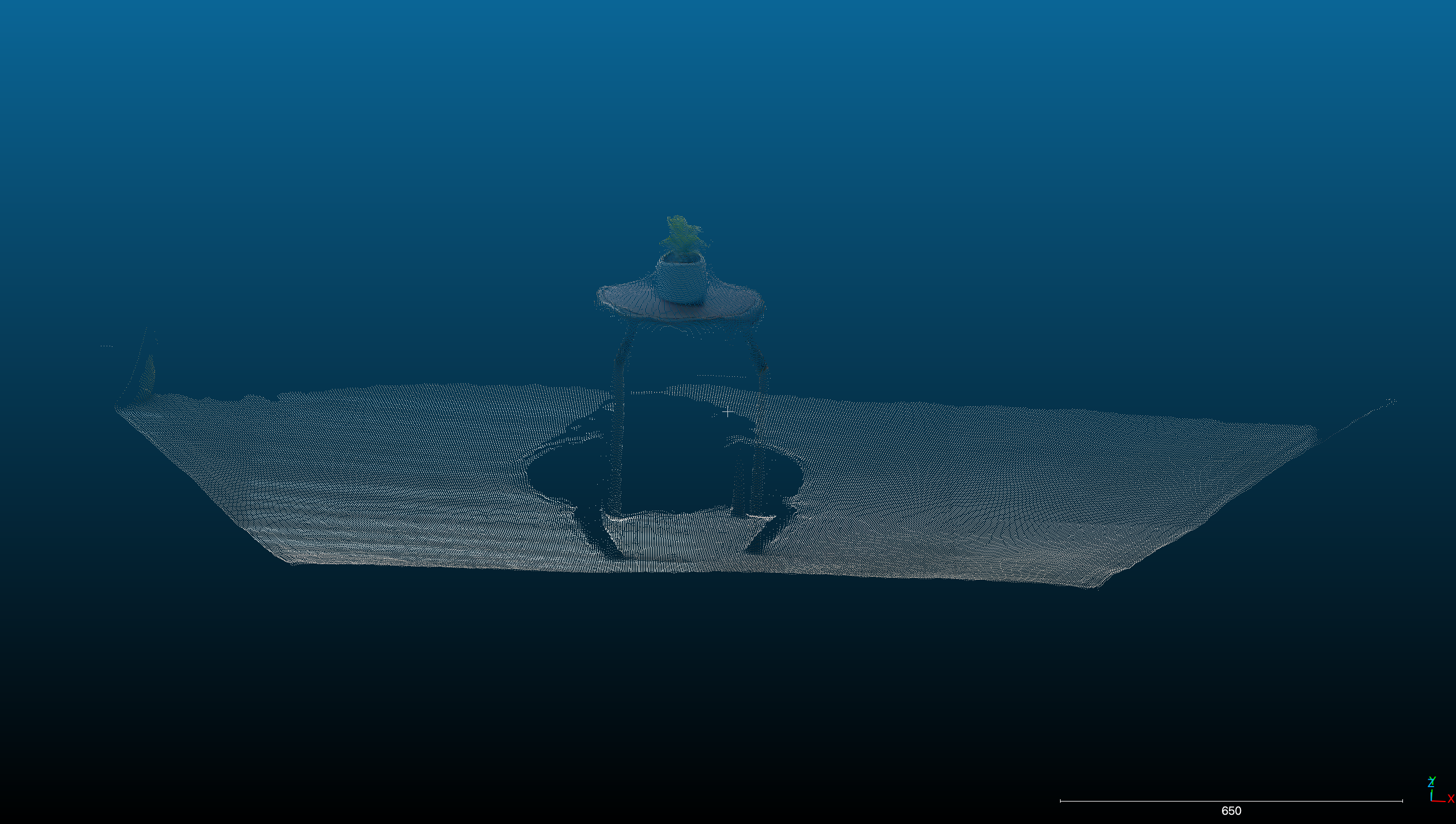
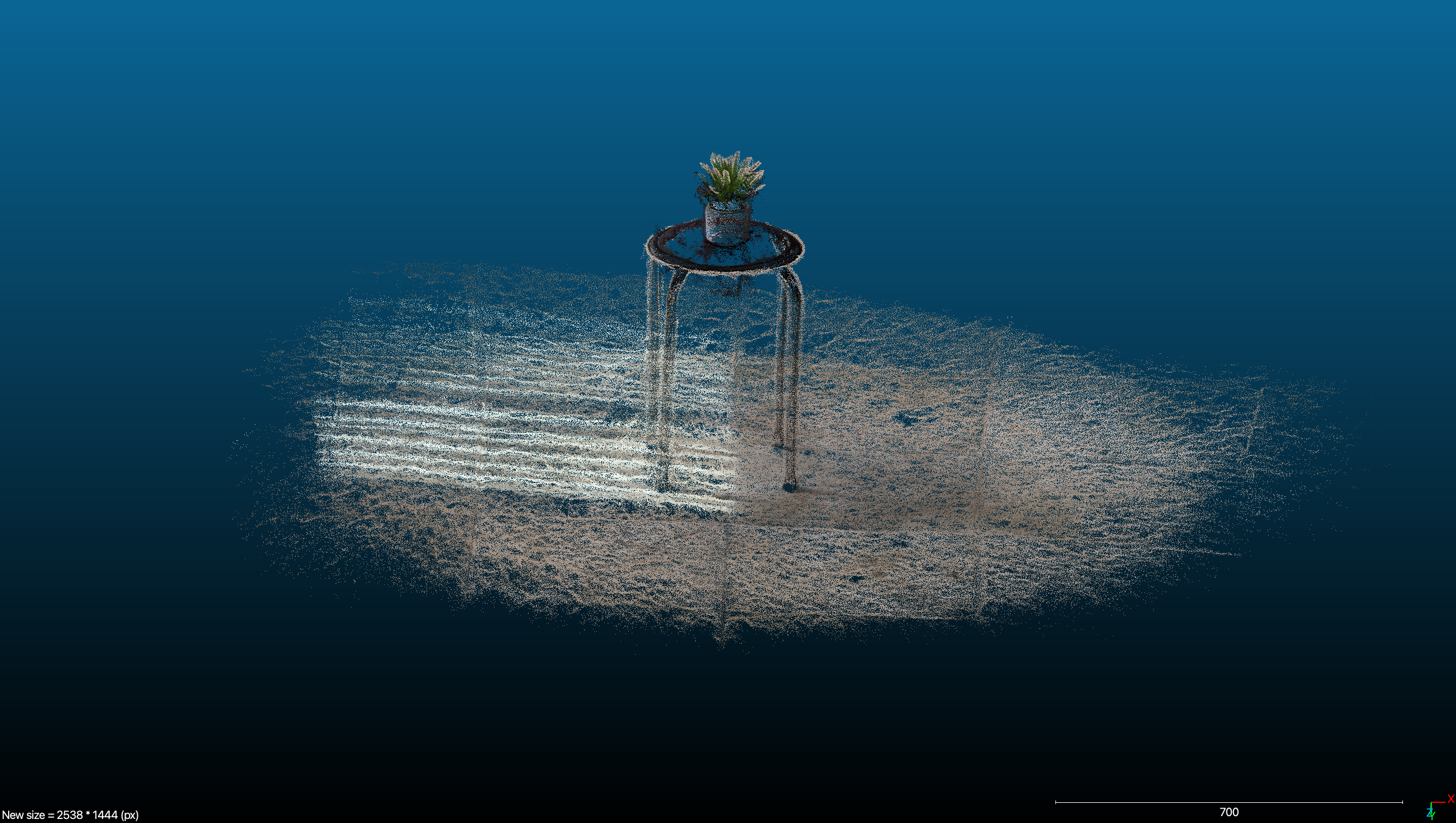
Artificial Plant Day
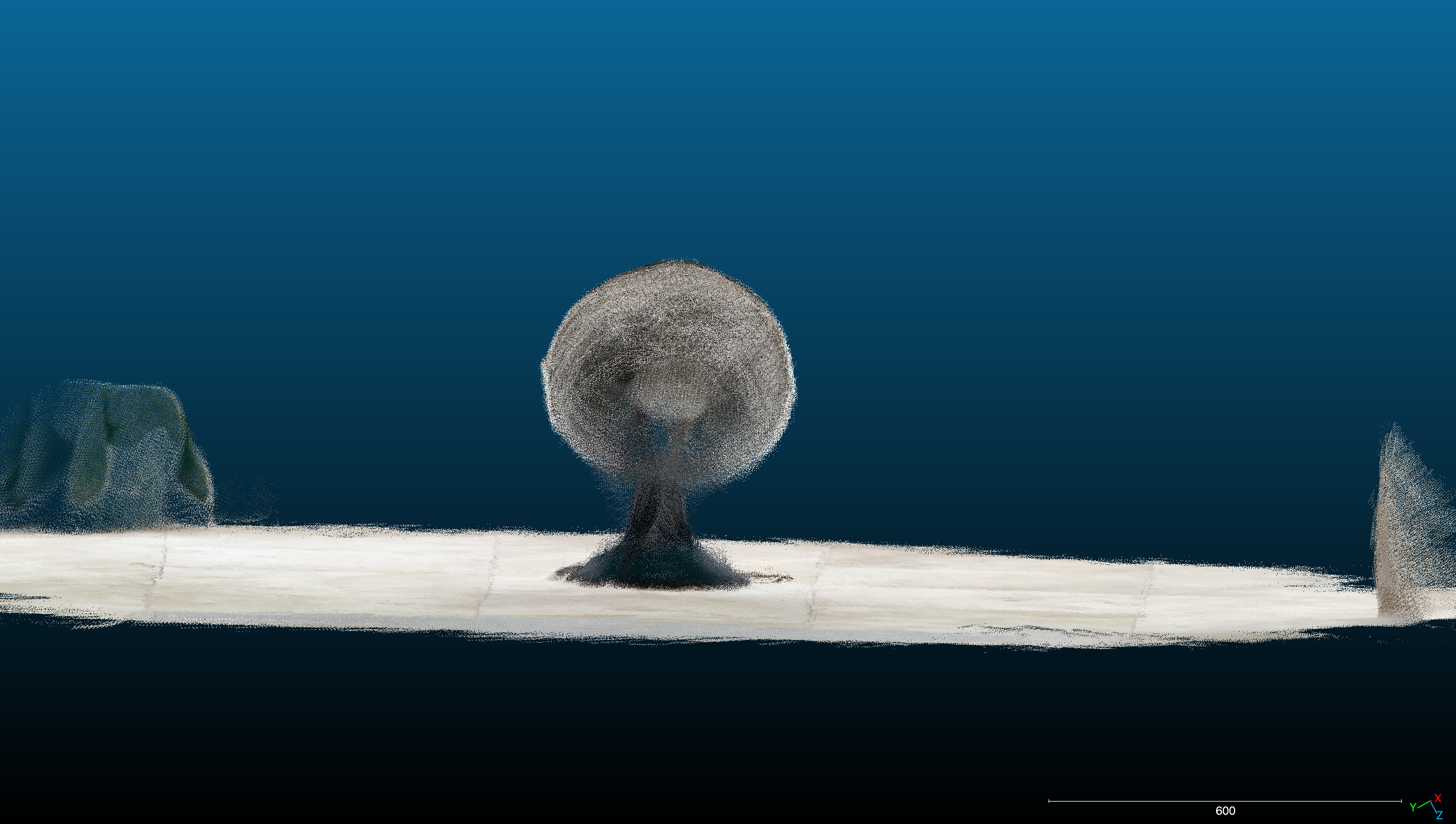
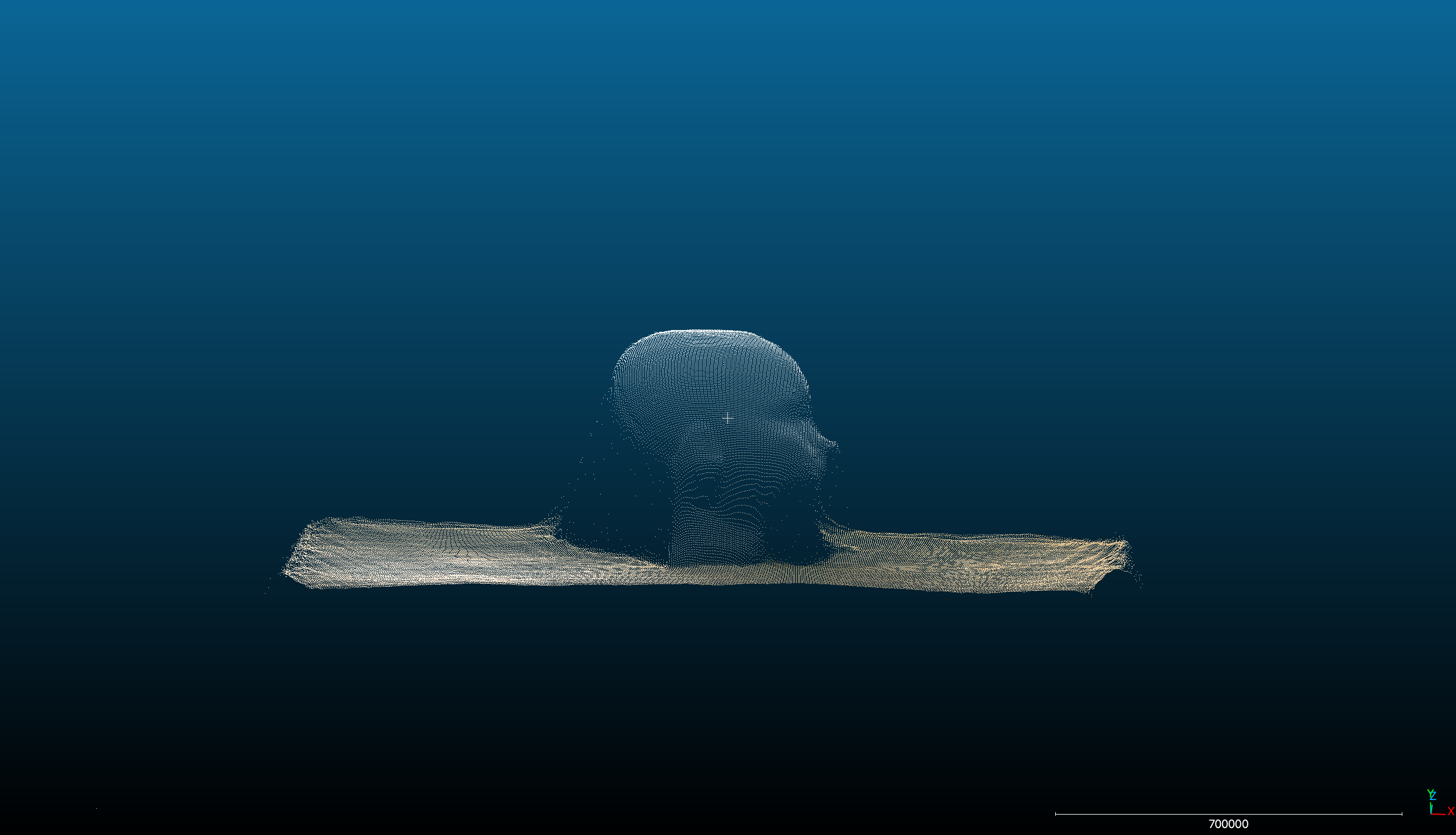
Electric Fan Day
Lab Chair
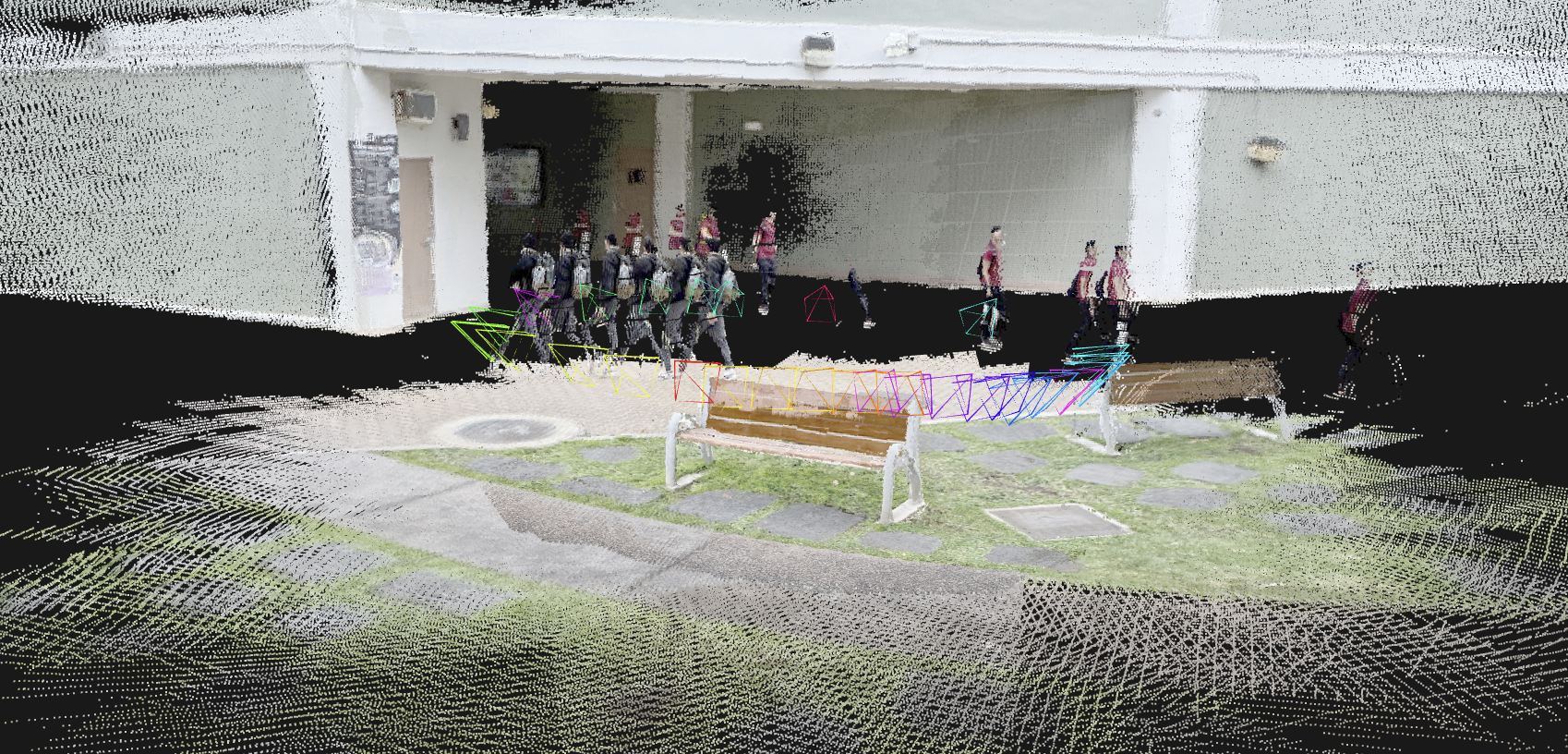
Evaluation pipeline